Read article 'The coolest job in physics'
Read article 'The coolest job in physics'
Read article 'The coolest job in physics'
Read article 'The coolest job in physics'
 Read article 'Probing resonant production of Higgs bosons'
Read article 'Probing resonant production of Higgs bosons'
No known particle is heavy enough to decay into two Higgs bosons. The resonant production of Higgs pairs would therefore be clear evidence for new physics.
 Read article 'Accelerator sustainability in focus'
Read article 'Accelerator sustainability in focus'
A workshop on sustainability for future accelerators took place on 25–27 September in Morioka, Japan.
A new analysis by LHCb of the open-charm hadrons in Λb decays was presented at the International Conference on Meson-Nucleon Physics and the Structure of the Nucleon
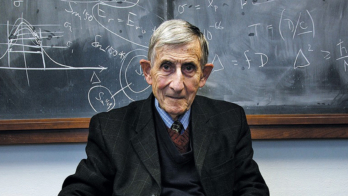
An iconic figure in modern science, Higgs in 1964 postulated the existence of the eponymous Higgs boson.
The directors of KEK, CERN, Fermilab and IHEP discussed a future global strategy at the 13th ICFA seminar.
A major upgrade to the AMS-02 tracking system planned for 2026 will bring key information relating to a mysterious excess of cosmic rays at high energies.
The oldest black hole found by the JWST and Chandra telescopes hints at the seeds of supermassive black-hole formation.
 Read about 'CERN Courier magazine: get the latest issue'
Read about 'CERN Courier magazine: get the latest issue'
Browse the editor’s picks by downloading a PDF of the most recent issue of CERN Courier
 Read about 'In focus: enabling technologies'
Read about 'In focus: enabling technologies'
The platform technologies that underpin Europe’s large-scale research facilities
 Read article 'Igor Savin 1930–2023'
Read article 'Igor Savin 1930–2023'
He gained international prestige by studying interference in K-meson decays in experiments at CERN.
 Read article 'Fritz Nolden 1953–2023'
Read article 'Fritz Nolden 1953–2023'
An accelerator physicist who was driven by theoretical problems.
 Read article 'Kishori Mohan Pathak 1930–2023'
Read article 'Kishori Mohan Pathak 1930–2023'
A brilliant cosmic-ray physicist, the first doctor of physics at Gauhati University and a founding vice-chancellor of Central Tezpur University.
 Read article 'Mykola Shulga 1947–2024'
Read article 'Mykola Shulga 1947–2024'
An outstanding Ukrainian theoretical high-energy physicist.
 Read article 'Bruce Marsh 1980–2023'
Read article 'Bruce Marsh 1980–2023'
A recognised international leader in laser technologies for radioactive ion-beam production.
 Read article 'Advances in cosmology'
Read article 'Advances in cosmology'
The papers assembled in this volume range in subject matter from dark-matter searches and gravitational waves to artistic and philosophical considerations.
 Read article 'Tango for two: LHCb and theory'
Read article 'Tango for two: LHCb and theory'
The 13th Implications of LHCb measurements and future prospects workshop showcased mutual enthusiasm between the experimental and theoretical communities
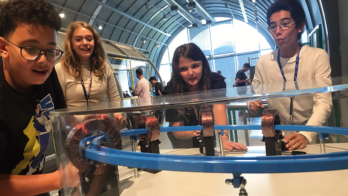
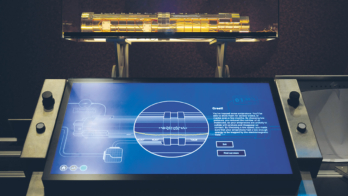
 Read article 'Education and outreach in particle physics'
Read article 'Education and outreach in particle physics'
A celebration of the opening of CERN Science Gateway, a new flagship centre for science education and outreach.
 Read article 'Pushing accelerator frontiers in Bern'
Read article 'Pushing accelerator frontiers in Bern'
The topical workshop “Gigahertz Rate and Rapid Muon Acceleration” showed how advanced accelerator concepts can jump-start dark-sector searches.
 Read article 'Balancing matter and antimatter in Pb–Pb collisions'
Read article 'Balancing matter and antimatter in Pb–Pb collisions'
The ALICE collaboration has placed stringent limits on models describing baryon-number transport effects.
 Read article 'Belle II back in business'
Read article 'Belle II back in business'
Having emerged from a scheduled long shutdown, the upgraded Belle II detector in Japan recorded its first collisions on 20 February.
 Read article 'Iodine vapours impact climate modelling'
Read article 'Iodine vapours impact climate modelling'
Climate models are missing an important source of aerosol particles in polar and marine regions, according to new results from the CLOUD experiment at CERN.